Breakthrough in Robot Movement: New Tool Calculates Intrinsic Dynamics for Effortless Locomotion
2 Sources
2 Sources
[1]
Effortless robot movements
Four-legged animals that start walking and gradually pick up speed will automatically fall into a trot at some point. This is because it would take more energy not to change gait. This correlation was discovered more than 40 years ago. Now, Alin Albu-Schäffer, a professor at the Chair of Sensor-based Robotic Systems and Intelligent Assistance Systems at TUM, has successfully transferred this method to the movement of robots. Experts use the term 'intrinsic dynamics' for the way humans and animals perform energy-efficient movements. For example, they adjust the stiffness of their muscles when they walk on a more rigid surface. These intrinsic adaptations, which happen automatically, are challenging to identify in humans and complex robotic systems. Tool filters out the most economical movements But a new tool developed by a team led by Prof. Albu-Schäffer at TUM makes this possible: "For the first time, we have succeeded in making these intrinsic, highly efficient movements calculable. The tool makes it possible to find out which movements of a system are particularly economical." An important test object in the team's research is BERT, a four-legged robot that looks like a small dog. BERT was designed by Prof. Albu-Schäffer at the German Aerospace Centre (DLR). The research, which focuses on "efficient and versatile locomotion with legs," is funded by the EU through an ERC Advanced Grant. The researchers identified six movement patterns for BERT, which Prof. Albu-Schäffer describes as exceptionally effortless and which would not require any energy in a world without friction. Some correspond to familiar gaits of quadrupeds, such as walking, trotting, or hopping. "We have thus confirmed the hypothesis that efficient gaits can be realized by exploiting natural oscillation patterns," explains Prof. Albu-Schäffer, who is also involved in the Munich Institute of Robotics and Machine Intelligence (MIRMI). Hitting natural oscillations with precise timing To realize these movements in a natural system with friction, a computer-controlled regulator has now been added that delivers an impulse at the right moment. "You can compare it to a child sitting on a playground swing and receiving an energy impulse at the highest point from the parent who is pushing," explains Annika Schmidt from Prof. Albu-Schäffer's research team. With one difference: "Humans don't need a lot of equations in their heads to time their push exactly -- they do it intuitively," says the doctoral student, who has spent several years studying how to teach robots the right rhythm. Success is demonstrated in a race between three BERT models. The robot dog, which has been programmed with the intrinsic movement method, tends to jump and move much faster and more dynamically than its siblings, which rely on more conventional movement patterns.
[2]
New tool calculates intrinsic dynamics for effortless robot movements
Four-legged animals that start walking and gradually pick up speed will automatically fall into a trot at some point. This is because it would take more energy not to change gait. This correlation was discovered more than 40 years ago. Now, Alin Albu-Schäffer, a professor at the Chair of Sensor-based Robotic Systems and Intelligent Assistance Systems at TUM, has successfully transferred this method to the movement of robots. Experts use the term "intrinsic dynamics" for the way humans and animals perform energy-efficient movements. For example, they adjust the stiffness of their muscles when they walk on a more rigid surface. These intrinsic adaptations, which happen automatically, are challenging to identify in humans and complex robotic systems. Tool filters out the most economical movements But a new tool developed by a team led by Prof. Albu-Schäffer at TUM makes this possible. "For the first time, we have succeeded in making these intrinsic, highly efficient movements calculable. The tool makes it possible to find out which movements of a system are particularly economical." An important test object in the team's research is BERT, a four-legged robot that looks like a small dog. BERT was designed by Prof. Albu-Schäffer at the German Aerospace Center (DLR). The research, which focuses on "efficient and versatile locomotion with legs," is published in PLOS Computational Biology. The researchers identified six movement patterns for BERT, which Prof. Albu-Schäffer describes as exceptionally effortless and which would not require any energy in a world without friction. Some correspond to familiar gaits of quadrupeds, such as walking, trotting, or hopping. "We have thus confirmed the hypothesis that efficient gaits can be realized by exploiting natural oscillation patterns," explains Prof. Albu-Schäffer, who is also involved in the Munich Institute of Robotics and Machine Intelligence (MIRMI). Hitting natural oscillations with precise timing To realize these movements in a natural system with friction, a computer-controlled regulator has now been added that delivers an impulse at the right moment. "You can compare it to a child sitting on a playground swing and receiving an energy impulse at the highest point from the parent who is pushing," explains Annika Schmidt from Prof. Albu-Schäffer's research team. With one difference: "Humans don't need a lot of equations in their heads to time their push exactly -- they do it intuitively," says the doctoral student, who has spent several years studying how to teach robots the right rhythm. That research was presented at the 2024 European Control Conference. Success is demonstrated in a race between three BERT models. The robot dog, which has been programmed with the intrinsic movement method, tends to jump and move much faster and more dynamically than its siblings, which rely on more conventional movement patterns.
Share
Share
Copy Link
Researchers at TUM have developed a tool that calculates intrinsic dynamics for robots, enabling more efficient and natural movements. This breakthrough could revolutionize robotic locomotion, making it more energy-efficient and adaptable.

Revolutionizing Robot Movement with Intrinsic Dynamics
Researchers at the Technical University of Munich (TUM) have made a significant breakthrough in robotic locomotion by developing a tool that calculates intrinsic dynamics for more efficient and natural robot movements. This innovation, led by Professor Alin Albu-Schäffer from the Chair of Sensor-based Robotic Systems and Intelligent Assistance Systems, draws inspiration from the energy-efficient movements of animals and humans
1
2
.Understanding Intrinsic Dynamics
Intrinsic dynamics refers to the automatic, energy-efficient movements that humans and animals perform. For instance, quadrupeds naturally transition from walking to trotting as they increase speed, a phenomenon discovered over four decades ago. These adaptations, which include adjusting muscle stiffness on different surfaces, have been challenging to identify and replicate in complex robotic systems until now
1
2
.The Breakthrough Tool
The newly developed tool at TUM marks the first successful attempt to make these intrinsic, highly efficient movements calculable for robotic systems. Professor Albu-Schäffer explains, "For the first time, we have succeeded in making these intrinsic, highly efficient movements calculable. The tool makes it possible to find out which movements of a system are particularly economical"
1
2
.BERT: The Four-Legged Test Subject
A key component of this research is BERT, a four-legged robot resembling a small dog, designed by Professor Albu-Schäffer at the German Aerospace Center (DLR). Using their new tool, the researchers identified six exceptionally effortless movement patterns for BERT, which would require no energy in a frictionless world. These patterns correspond to familiar quadruped gaits such as walking, trotting, and hopping
1
2
.Implementing Natural Movements
To apply these movements in real-world conditions with friction, the team added a computer-controlled regulator that provides impulses at precise moments. Annika Schmidt, a doctoral student on the research team, likens this to pushing a child on a swing: "You can compare it to a child sitting on a playground swing and receiving an energy impulse at the highest point from the parent who is pushing"
1
2
.Related Stories

Demonstrating Success
The effectiveness of this new approach was demonstrated through a race between three BERT models. The robot programmed with the intrinsic movement method exhibited significantly faster and more dynamic movements compared to its counterparts using conventional movement patterns
1
2
.Implications and Future Applications
This breakthrough has far-reaching implications for the field of robotics. By enabling robots to move more efficiently and naturally, it could lead to advancements in various applications, from search and rescue operations to assistive technologies. The research, focusing on "efficient and versatile locomotion with legs," was funded by an EU ERC Advanced Grant and published in PLOS Computational Biology
1
2
.As robotics continues to evolve, innovations like this bring us closer to creating machines that can seamlessly integrate into human environments, performing tasks with the same effortless grace observed in nature.
References
Summarized by
Navi
[1]
Related Stories
Animal-Inspired AI Robot 'Clarence' Learns to Navigate Unfamiliar Terrain Autonomously
12 Jul 2025•Science and Research

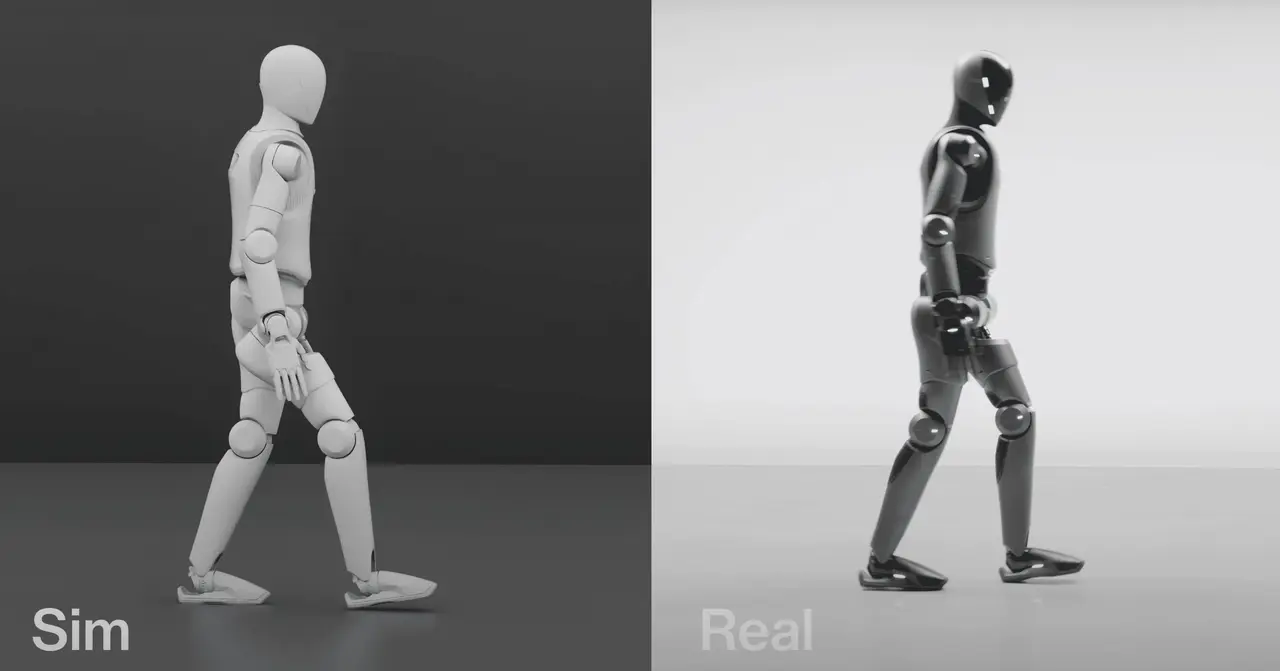
Figure AI's Humanoid Robot Achieves Natural Walking Through AI Simulation
26 Mar 2025•Technology
Humanoid Robot Masters Waltz and More Through AI-Powered Human Movement Mirroring
17 Jan 2025•Technology

Recent Highlights
1
Google releases Gemma 4 with Apache 2.0 license, enabling unrestricted local AI on devices
Technology
2
AI Models Lie, Cheat, and Defy Human Instructions to Protect Other AI Models From Deletion
Science and Research

3
Anthropic discovers emotion-like patterns in Claude that actively shape AI behavior and decisions
Science and Research
Recent Highlights
Today's Top Stories



Your Daily Dose of Curated AI News
Don’t drown in AI news. We cut through the noise - filtering, ranking and summarizing the most important AI news, breakthroughs and research daily. Spend less time searching for the latest in AI and get straight to action.