Consistency in training data helps robots master complex skills better than varied examples
2 Sources
[1]
Scientists find smarter way to teach robots complex skills
Teaching robots to manipulate objects with human-like dexterity remains one of the biggest challenges in robotics. A new study suggests that the answer may not lie in feeding robots more complex training data, but in giving them more consistent examples to learn from. Researchers from New York University Tandon School of Engineering and the Robotics and AI Institute found that robots trained on structured, predictable demonstrations performed significantly better than those trained on highly variable examples. The work could help improve how robots learn tasks that involve complex hand movements, changing grips, and coordination between multiple limbs. Many robot-learning systems rely on imitation learning, where machines learn by copying demonstrations performed by humans. But collecting demonstrations for highly dexterous tasks is difficult because teleoperation systems struggle to capture the fine finger movements and contact-rich interactions involved. To overcome that limitation, the researchers turned to motion-planning algorithms that automatically generate demonstrations inside physics simulations. Instead of learning from humans, the robots learned from virtual examples created by software. The team soon discovered a problem. Popular planning methods known as rapidly exploring random trees (RRTs) produced solutions that varied too much from one demonstration to another, making it harder for robots to identify the behavior they were supposed to imitate. "These planners are very good at finding solutions," said lead author Huaijiang Zhu. "But when every solution looks different, the learning system struggles to figure out what behavior it should imitate." According to the researchers, the randomness in RRT-generated demonstrations creates what is known as high-entropy data. While such diversity helps planning algorithms explore different solutions, it can reduce the effectiveness of imitation learning. To address the issue, the team developed alternative planning approaches designed to generate more consistent demonstrations. One method prioritized steady progress toward a goal, while another relied on a library of predefined motions to reduce variation between examples. The researchers evaluated the approach using two challenging manipulation tasks. In one experiment, two robotic arms had to rotate a large cylinder by 180 degrees while repeatedly adjusting their grips. In another, a dexterous robotic hand manipulated a cube within its palm to match target orientations. Robots trained on the more consistent demonstrations achieved substantially higher success rates than those trained on standard RRT-generated data. In the dual-arm task, the system reached near-perfect performance using only 100 demonstrations. The team also transferred the learned policies directly from simulation to physical hardware without additional retraining. The dual-arm robot succeeded in 90% of real-world trials, while the robotic hand completed about 62% of its attempts. The findings highlight a growing trend in robotics that combines traditional motion planning with machine learning. Rather than treating the two approaches separately, researchers are increasingly using planning algorithms to generate training data for learning systems. The study also reinforces a broader lesson in artificial intelligence: larger amounts of data do not always lead to better learning. In some cases, carefully structured examples may be more valuable than large collections of noisy or inconsistent demonstrations. The study was published in the journal IEEE Robotics and Automation Letters.
[2]
New Research Suggests Consistency, Not Complexity, Is the Key to Teaching Robots Dexterity | Newswise
Newswise -- Teaching robots to manipulate objects with humanlike dexterity has long been one of robotics' toughest challenges. Tasks such as rotating an object in-hand or coordinating two robot arms to maneuver a bulky item require constant changes in contact, grip and motion, skills that are difficult both to program and to demonstrate through human teleoperation. Now researchers from NYU Tandon and the Robotics and AI Institute have shown that robots may be able to learn these behaviors from planning algorithms instead of human demonstrations. Their study, published in IEEE Robotics and Automation Letters (RA-L), suggests that the quality of synthetic training data matters more than researchers previously realized. The paper was recently awarded the IEEE RA-L Best Paper Award. Modern robot-learning systems often rely on imitation learning, in which robots copy demonstrations collected from humans controlling robotic hardware remotely. But teleoperation systems are poorly suited for highly dexterous tasks involving many simultaneous contact points and finger movements. To bypass that limitation, the researchers used motion-planning algorithms to automatically generate demonstrations inside physics simulations. The idea was to let robots learn from virtual experience rather than from people. But the team discovered a problem: popular planning systems known as rapidly exploring random trees, or RRTs, produce demonstrations that are too inconsistent. "These planners are very good at finding solutions," says lead author Huaijiang Zhu. "But when every solution looks different, the learning system struggles to figure out what behavior it should imitate." The team found that the planners' randomness created what researchers call "high-entropy" data -- demonstrations that solved the same task through wildly different motions. Although this diversity helps planners explore possible solutions, it makes imitation learning less effective. To address the issue, the researchers developed alternative planning approaches that generated more consistent demonstrations. One method emphasized steady progress toward a goal rather than random exploration, while another reused a library of predefined motions to reduce variability. The researchers tested the approach on two difficult manipulation problems. In one task, two robot arms had to rotate a large cylinder by 180 degrees while repeatedly changing their grips. In another, a dexterous robotic hand manipulated a cube in its palm to match target orientations. They found that robots trained on the more consistent demonstrations achieved much higher success rates than those trained on standard RRT-generated data, even when using relatively small datasets. In the dual-arm task, the improved system reached near-perfect performance with only 100 demonstrations. The team also transferred the learned policies directly from simulation to real-world hardware without additional retraining. The dual-arm robot succeeded in 90 percent of physical trials, while the dexterous hand completed about 62 percent of its attempts. The study highlights a growing shift in robotics research. Rather than treating classical motion planning and machine learning as separate approaches, scientists are increasingly combining them. In this case, planning algorithms effectively served as teachers for neural-network-based robot policies. The findings also reinforce a broader lesson emerging across AI: more data is not always better. Carefully structured, consistent examples may teach machines more effectively than large quantities of noisy or highly variable demonstrations. Challenges remain, particularly for tasks involving deformable objects or soft robotic hands that are difficult to simulate accurately. But the work suggests a future in which robots learn increasingly sophisticated physical skills from virtual environments designed not just to produce solutions, but to produce solutions machines can understand.
Share
Copy Link
Researchers from NYU Tandon and the Robotics and AI Institute discovered that robots learn dexterous manipulation tasks more effectively from consistent, structured demonstrations rather than highly variable training examples. The breakthrough approach achieved 90% success in real-world trials and could reshape how robots acquire complex physical skills.
Teaching Robots Complex Skills Through Structured Data
Robot training has taken a significant step forward as researchers from NYU Tandon School of Engineering and the Robotics and AI Institute uncovered that consistency in training data matters more than complexity when teaching robots dexterous manipulation. The study, published in IEEE Robotics and Automation Letters and recently awarded the IEEE RA-L Best Paper Award, challenges conventional assumptions about how machines acquire physical skills
1
2
.Many robot-learning systems depend on imitation learning, where machines copy demonstrations performed by humans through human teleoperation systems. However, these systems struggle to capture the fine finger movements and contact-rich interactions required for highly dexterous tasks. Lead author Huaijiang Zhu and his team turned to motion-planning algorithms that automatically generate demonstrations inside physics simulations, allowing robots to learn from virtual experience created by software rather than human operators
1
.The Problem with High-Entropy Data
The researchers identified a critical flaw in popular planning methods known as rapidly exploring random trees (RRTs). While these planners excel at finding solutions, they produce demonstrations that vary too much from one example to another. "These planners are very good at finding solutions," Zhu explained. "But when every solution looks different, the learning system struggles to figure out what behavior it should imitate"
2
. This randomness creates high-entropy synthetic training data that, despite helping planning algorithms explore different solutions, reduces the effectiveness of machine learning.Alternative Planning Approaches Deliver Results
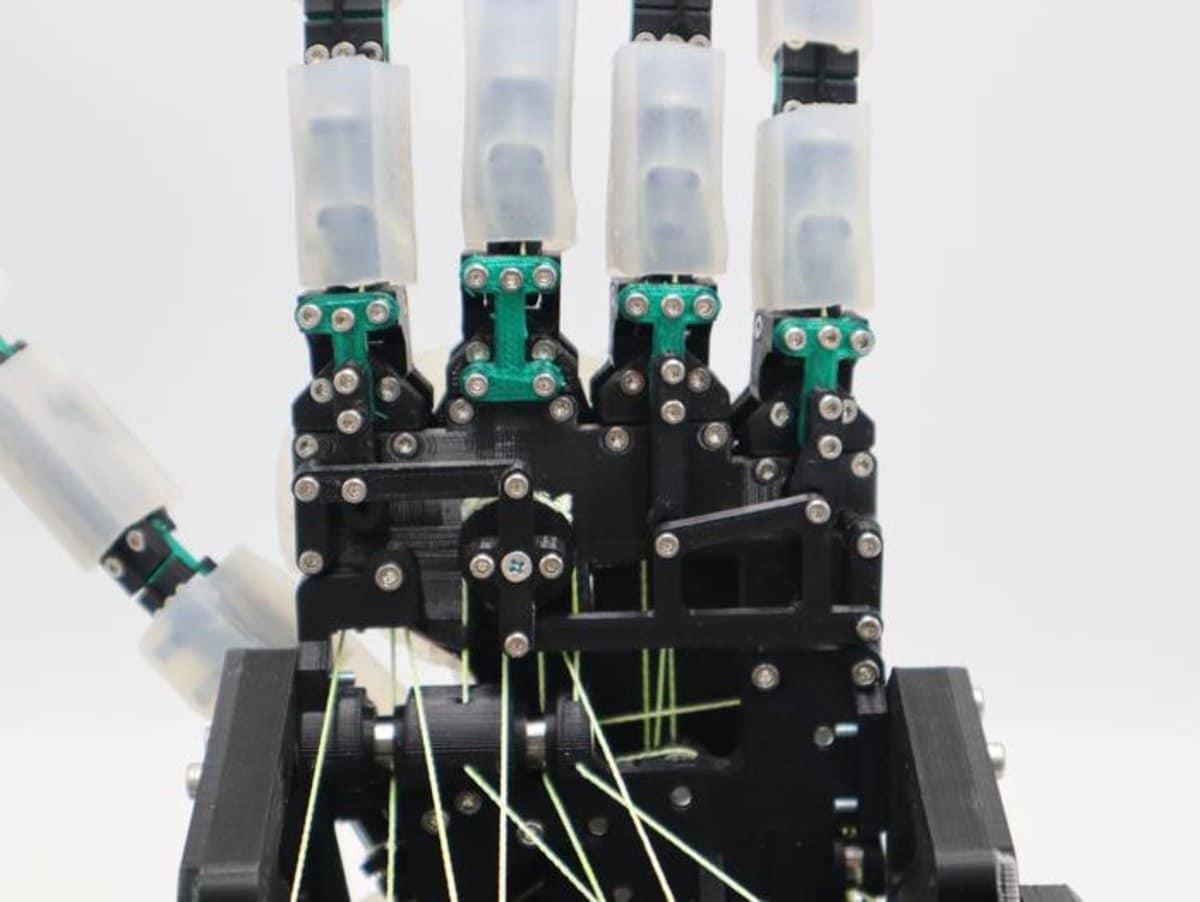
To address this challenge, the team developed alternative planning approaches designed to generate more consistent demonstrations. One method prioritized steady progress toward a goal rather than random exploration, while another relied on a library of predefined motions to reduce variation between examples. The researchers tested their approach using two challenging manipulation tasks: dual robotic arms rotating a large cylinder by 180 degrees while repeatedly adjusting grips, and a dexterous robotic hand manipulating a cube within its palm to match target orientations
1
.Robots trained on the more consistent demonstrations achieved substantially higher success rates. In the dual-arm task, the system reached near-perfect performance using only 100 demonstrations, highlighting how data quality and consistency outperforms sheer volume
2
.
Source: Interesting Engineering
Related Stories



Transferring Skills from Simulation to Real-World Robots
The team successfully transferred learned policies directly from simulation to physical hardware without additional retraining. The dual-arm robot succeeded in 90% of real-world trials, while the dexterous robotic hand completed approximately 62% of its attempts. These results demonstrate that combining motion planning with machine learning can produce AI training methods that work effectively on actual robotics hardware
1
2
.Implications for Future Robotics Development
This research highlights a growing trend where scientists increasingly treat classical motion planning and machine learning as complementary rather than separate approaches. The findings reinforce a broader lesson emerging across AI: larger amounts of data do not always lead to better learning outcomes. Carefully structured examples may teach machines more effectively than large collections of noisy or inconsistent demonstrations. The work suggests a future where dexterous robotic arms and hands learn sophisticated physical skills from virtual environments designed to produce solutions machines can understand. Challenges remain for tasks involving deformable objects or soft robotic components that are difficult to simulate accurately, but the study opens new pathways for advancing robot capabilities in manufacturing, logistics, and beyond
2
.References
Summarized by
Navi
[1]
Related Stories
Recent Highlights
1
Xi Jinping positions China as global AI partner while challenging US tech dominance
Policy and Regulation

2
Moonshot AI releases Kimi K3, China's largest AI model challenging OpenAI and Anthropic
Technology

3
Apple releases Siri AI to everyone through iOS 27 public beta, marking biggest assistant overhaul
Technology

Recent Highlights
Today's Top Stories



Don’t drown in AI news. We cut through the noise - filtering, ranking and summarizing the most important AI news, breakthroughs and research daily. Follow topics that matter to you and stay ahead.


